在库卡机器人编程中,定点操作是指让机器人在特定位置停止或执行特定任务的过程。这在工业自动化中非常常见,例如在装配线上进行零件组装、焊接、搬运等任务时,需要机器人准确地移动到指定位置并执行相应的动作。
库卡机器人通常配备有示教器,可以通过示教器进行定点编程。具体步骤如下:
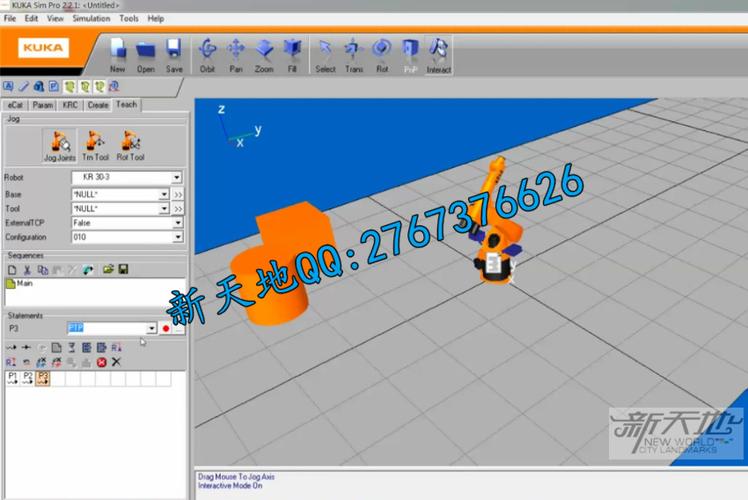
除了示教器,库卡机器人还支持使用编程语言进行定点编程,常用的编程语言包括 KRL(KUKA Robot Language)和 KAREL(KUKA Robot Language)。通过编程语言进行定点编程可以实现更加复杂和灵活的控制。
以下是使用 KRL 进行定点编程的示例:
```krl PTP P1:=[X 100,Y 200,Z 300,A 90,B 0,C 0]; ! 定义目标位置 P1 PTP P1; ! 机器人移动到目标位置 P1 ```在进行定点编程时,需要注意以下几点:
定点操作是库卡机器人编程中的基础操作,在实际应用中非常重要。建议在进行定点编程时,充分了解机器人的运动学原理和编程语言,结合具体任务需求进行定点操作的规划和实施。
定点编程也可以结合视觉系统或传感器技术,实现更加精准和智能的定位和操作,提高生产效率和质量。
版权声明:本文为 “联成科技技术有限公司” 原创文章,转载请附上原文出处链接及本声明;