ABB机器人广泛应用于工业生产中的搬运和装配操作。在进行搬运程序编程时,我们需要考虑以下几个步骤:
在开始编程之前,首先需要明确机器人的工作目标。这包括搬运的物体类型、重量、尺寸以及搬运的距离和高度等信息。理解清楚工作目标可以帮助确定机器人的动作和路径规划。
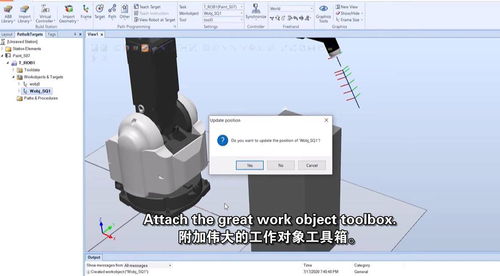
根据工作目标,编写逻辑程序来指导机器人的动作流程。这包括机器人的起点和终点位置、搬运路径规划、夹持动作、卸载动作等。在ABB机器人编程中,通常使用类似于ABB的
RobotStudio等专业软件进行编程。
在编写搬运程序时,安全是至关重要的。确保机器人搬运过程中不会与人员或其他设备发生碰撞,同时需要考虑物体的稳固性和夹持的安全性。
在搬运程序中,路径规划和轨迹优化是至关重要的。通过合理的路径规划和轨迹优化,可以实现高效的搬运操作并减少机器人行动的时间。
在某些场景下,可能需要多个机器人协同完成搬运任务。在这种情况下,需要进行机器人之间的联动控制,确保它们协同工作并完成任务。
完成编程后,需要对搬运程序进行调试和优化。通过模拟和实际操作,检查程序是否能够实现预期的搬运效果,并对程序进行必要的优化和调整。
ABB机器人搬运程序编程需要结合机器人的动作规划、路径优化、安全性考虑以及实际任务需求,通过合理的编程和调试,实现高效、安全的搬运操作。
版权声明:本文为 “联成科技技术有限公司” 原创文章,转载请附上原文出处链接及本声明;