在控制工程中,PID控制器是一种常用的控制器类型,用于对系统进行稳定控制。PID控制器是由比例(Proportional)、积分(Integral)、和微分(Derivative)三部分组成的控制算法。下面介绍如何在编程中使用PID控制器:
在编程中使用PID控制器,首先需要初始化PID参数,包括比例系数(Kp)、积分时间(Ki)、微分时间(Kd)等。这些参数的选择会影响系统的控制效果,通常需要进行调试和优化。
在实际控制过程中,需要根据当前系统的反馈值和目标设定值来计算PID控制器的输出。PID输出的计算公式如下:
Output = Kp * error Ki * ∫error dt Kd * d(error) / dt
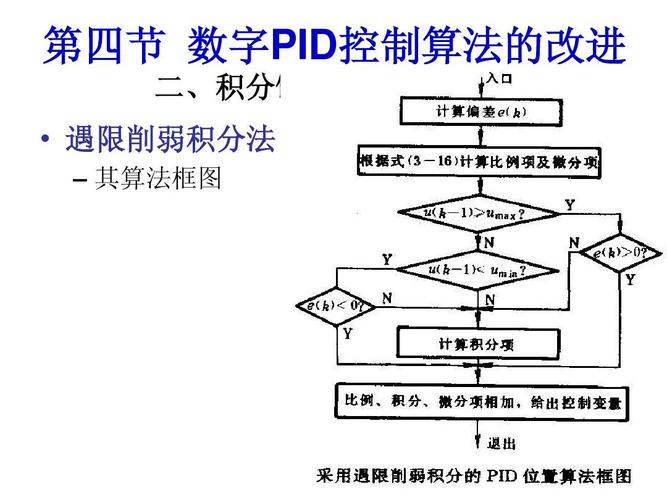
其中error是当前误差,∫error dt是误差的积分,d(error) / dt是误差的微分。根据系统的要求,可以选择不同的PID控制模式,比如位置型PID、增量型PID等。
在PID控制过程中,需要不断地获取系统的反馈值,并与目标设定值进行比较,从而调整PID控制器的输出。这样可以使系统不断逼近设定值,并保持稳定。
在编程中使用PID控制器时,通常需要进行调试和优化。可以通过改变PID参数、调整采样时间、限制输出范围等方式来优化控制效果。可以使用仿真工具对PID控制器进行模拟和测试,以验证控制效果。
对于实时控制系统,在编程中使用PID控制器时,需要考虑系统的性能和实时性。可以采用中断驱动、定时器触发等方式来实现精确的控制。
在编程中使用PID控制器需要深入理解PID算法原理,合理选择参数,并进行实时反馈控制。通过不断调试和优化,可以实现对系统的稳定控制。
版权声明:本文为 “联成科技技术有限公司” 原创文章,转载请附上原文出处链接及本声明;